
Actualidad
Premios y Reconocimientos
Rubén Tolosana Moranchel recibe el Premio Joven Investigador de la UAM 2024 en el área de Ingeniería de las Tecnologías de la Información y las Comunicaciones
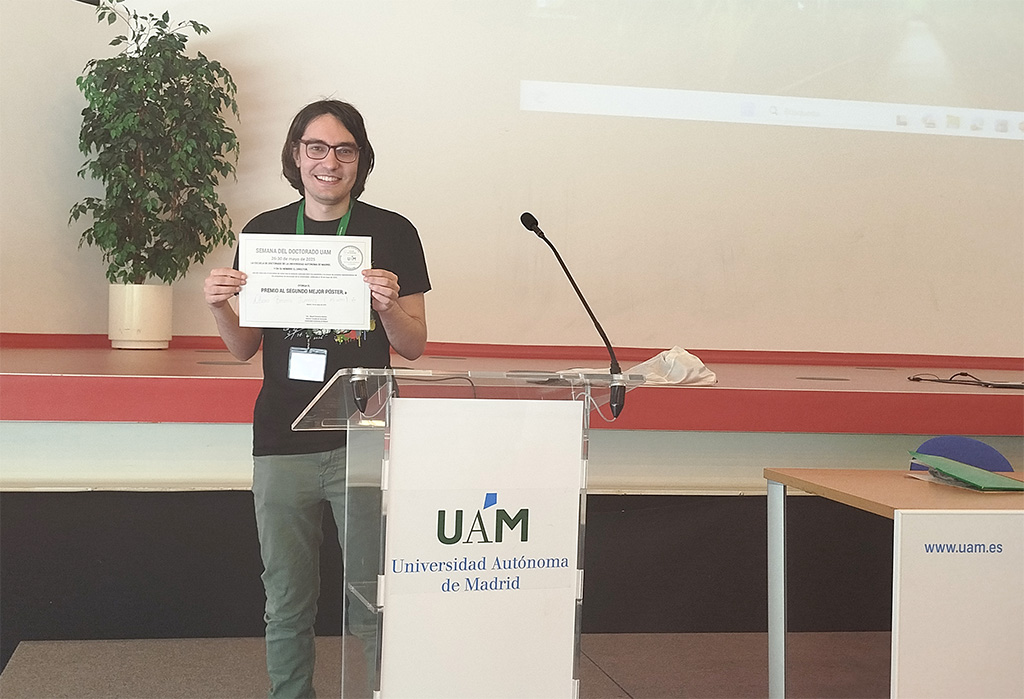
Estudiante de la EPS recibe el Segundo Premio al Mejor Póster durante la Semana del Doctorado UAM 2025
Estudiante de la EPS recibe el Segundo Premio al Mejor Póster durante la Semana del Doctorado UAM 2025
Elisa Barceló se jubila tras una vida dedicada a las bibliotecas de la UAM
Elisa Barceló se jubila tras una vida dedicada a las bibliotecas de la UAM
Tesis Doctoral realizada en la EPS es premiada por su excelencia en tecnologías de telecomunicación
Tesis Doctoral realizada en la EPS es premiada por su excelencia en tecnologías de telecomunicaciónEstudiante de la EPS galardonado por su Trabajo Fin de Máster del Máster Universitario en Ingeniería de Telecomunicación
Estudiante de la EPS galardonado por su Trabajo Fin de Máster del Máster Universitario en Ingeniería de Telecomunicación

